Garras Autônomas, a revolução da manipulação de objetos na indústria
{kind=link}
Atualmente os pontos de pega e depósito de peças, a geometria e os parâmetros de agarre precisam sempre ser definidos manualmente, para o futuro, os sistemas de garras terão uma ampla variedade de tarefas por conta própria. E os especialistas em garras da SCHUNK mostram as primeiras soluções.
O Sistema Plug & Work será a chave das indústrias inteligentes do amanhã. O que já foi implementado com sucesso com a mecânica, será possível também para o controle do processo de agarre no futuro. Logicamente de um ponto de vista específico, os especialistas do Smart Lab da SCHUNK estão desenvolvendo diferentes abordagens sobre como os robôs e outros sistemas de manipulação podem realizar essas tarefas de forma autônoma ou semiautônoma.
Em vez de definir individualmente posições, velocidade e força de agarre, sistemas de garras inteligentes vão, no futuro, detectar os objetos por câmeras e assim, planejar a performance de agarre por conta própria. Com base em registro de dados e algoritmos, os sistemas de garras serão capazes de detectar qualquer alteração do meio e desenvolver as reações correspondentes. Adicionalmente, o departamento de Pesquisa e Desenvolvimento da SCHUNK está trabalhando em algoritmos para classificar diferentes arranjos e geometrias e assim, desenvolver ótimas estratégias de agarre. A visão do alvo é composta por um conjunto de componentes e aprendizados com base na arquitetura de três camadas que inclui controlador de movimento, controlador de aderência e serviços. O plano é que, apesar de ter uma estrutura interna complexa, a montagem tenha várias possibilidades e seja amigável ao usuário.
Garras que executam planejamento de pega e posicionamento
A SCHUNK mostra como isso pode ser feito com sucesso, com base em vários aplicativos pilotos desenvolvidos na sua fábrica tecnológica. Com o aplicativo Smart Gripping, por exemplo, diferentes componentes são identificados por uma única garra. Como uma mão tateando, a garra percebe a geometria e a composição das peças para compreendê-las e categorizá-las. Em uma segunda aplicação, partes distribuídas de forma aleatória são identificadas por meio de uma câmera, agarradas autonomamente em uma caixa de transporte e guiadas para um processo de usinagem. O sistema retransmite as informações obtidas na peça para as estações subsequentes, de modo que, por exemplo, um bloco de força de aperto inteligente seja capaz de coordenar seu curso e força de aperto automaticamente para a próxima peça. De acordo com a SCHUNK, as garras não apenas seguram as peças, mas também lidam com todo o planejamento de interação de câmeras 2D e 3D e com a comunicação com componentes upstream e downstream.
Dados empíricos aprendidos como base
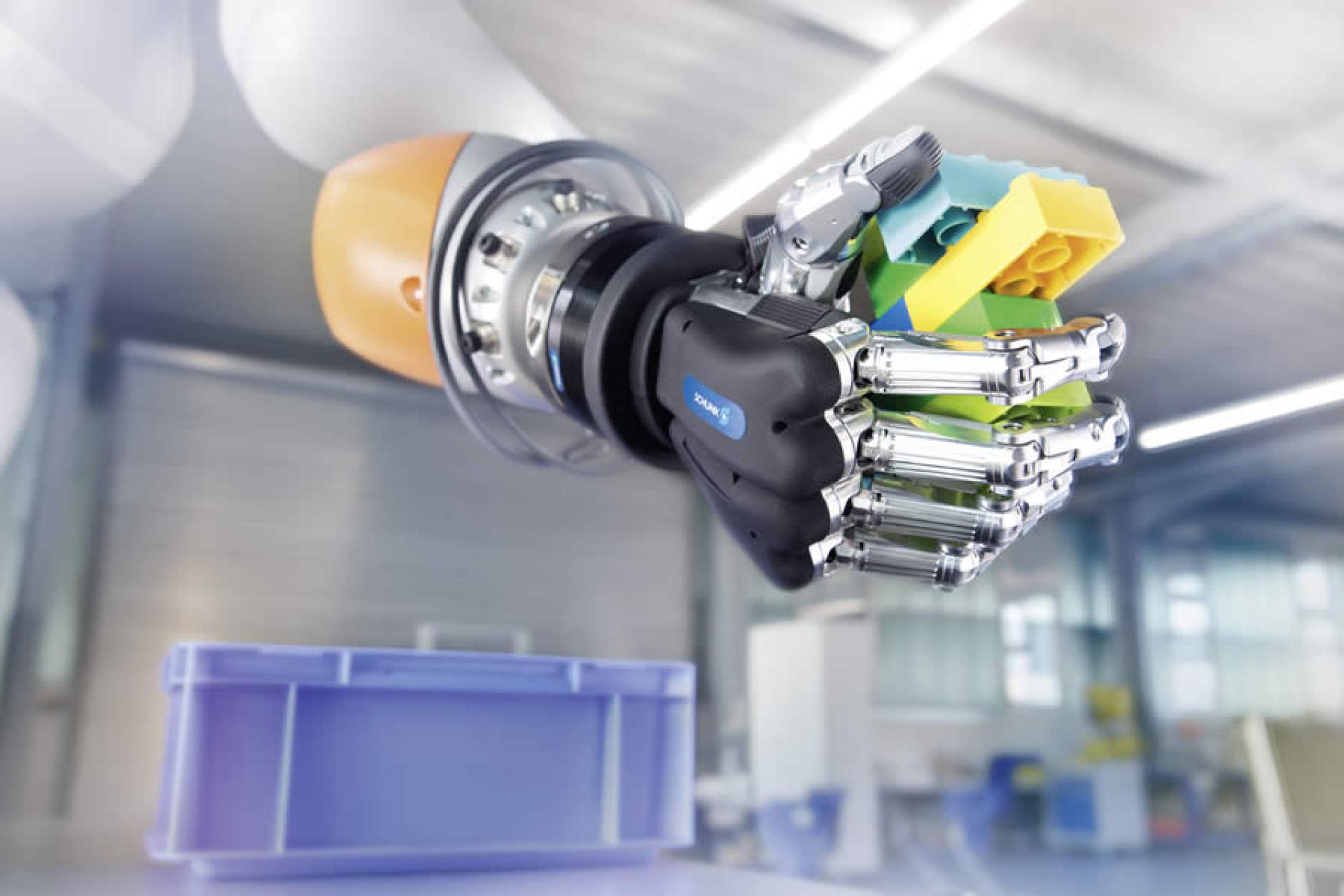
Em outro caso que utiliza abordagens de aprendizado de máquinas para classificação de peças e processos de garra, os blocos interligados são combinados aleatoriamente e são apresentados a um robô leve com os objetos dispostos de forma também aleatória na mesa de trabalho
A tarefa do robô é pegar e transportar os blocos para outro local. Após algumas tentativas, o sistema consegue classificar como manipular aleatoriamente as peças e resulta em algumas possíveis combinações. A garra sabe como pegar e transportar a peça otimizando seu manuseio, com base nos valores empíricos aprendidos. Enquanto isso, a câmera que captura o cenário, interage diretamente com a garra e guia o robô ao seu destino.
Após algumas repetições, o sistema é capaz de atuar autonomamente e classificar futuras combinações e arranjos por conta própria.
Compartilhando experiências aprendidas
O apelo específico dessas tecnologias vem da capacidade em compartilhar experiências adquiridas com outros sistemas de garras para aplicativos semelhantes em uma rede de produção ou em sites, como por exemplo, o uso de soluções em nuvem. Se o objeto não for conhecido, ele será detectado e determinado em tempo real pelo sistema da câmera, com a melhor maneira de captá-lo. As experiências de aprendizado, por sua vez, fluem diretamente para o sistema, estendendo a biblioteca correspondente de estratégias.
Compartilhe:: Participe do GRUPO SEGS - PORTAL NACIONAL no FACEBOOK...:
<::::::::::::::::::::>